
آموزش رباتها با سیگنال مغز انسان
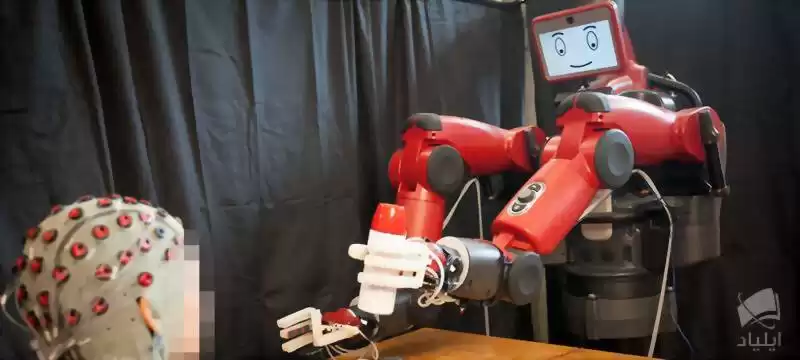
مجله علمی ایلیاد - ربات باکستر میتواند تفاوت بین اعمال صحیح و غلط را بدون اینکه انسانی آگاه به آن دستوری دهد و یا حتی کلمهای حرف بزند، تشخیص دهد. موفقیت سیستم یادگیری ربات بهخاطر سیستمی است که سیگنالهای خطای مغزی انسان را تشریح میکند و به باکستر اجازه میدهد بفهمد آیا اشتباهی رخ داده است یا خیر؟
این آموزش پیچیده به رباتها، توسط آزمایشگاه علوم کامپیوتر و هوشمصنوعی CSAIL دانشگاه MIT و دانشگاه بوستون انجام شده است. محققین مدتها است که میدانند مغز انسان در زمانی که متوجه اشتباهی میشود سیگنالهای خطایی مرتبط با آن تولید میکند. آنها نرمافزار یادگیری ماشینی ساختند که میتواند این سیگنالهای خطای مغز را از افراد داوطلب در ۱۰ تا ۳۰ میلیثانیه تشخیص داده و طبقهبندی کند. این روش برای باکستر نمونهی بارزی است که میتواند بدین طریق قوطیهای رنگ و قرقرههای سیم را که درون دو جعبهی مجزا جلوی فرد قرار دارند، طبقهبندی کند.
«دانیلا روس»، رئیس CSAIL دانشگاه MIT، در کنفرانس مطبوعاتی میگوید: «تصور کنید بتوانید بهصورت آنی به رباط دستور انجام کاری را بدهید، بدون اینکه نیاز باشد چیزی تایپ کنید و یا دکمهای را فشار دهید و یا کلمهای به زبان بیاورید. این روش ساده، میتواند توانایی ما در مدیریت رباتهای کارخانهها را بهبود بخشد، در ماشینهای بدون راننده به کار رود و حتی میتواند برای تکنولوژیهایی که هنوز اختراع نشدهاند، مفید واقع شود.»
افراد داوطلب کلاههای الکتروانسفالوگرافی یا همان EEG پوشیدند. این کلاهها میتوانند سیگنالهای خطا را زمانی که باکستر اشتباه میکند، تشخیص دهند. هر داوطلب ابتدا تحت دورهی آموزشی کوتاهمدتی قرار گرفت و نرمافزار یادگیری ماشین را آموزش دادند تا دانشمندان بتوانند سیگنالهای خطای خاص مغز هر کدام را تشخیص دهند. وقتی که این سیستم کامل شد، قادر بود که بازخوردی فوری از اینکه هر فرد اعمال ربات را تأیید و یا رد میکند، به ربات بدهد. این سیستم هنوز با کامل شدن فاصلهی زیادی دارد و حتی نمیتوان گفت که سیستمی با ۹۰ درصد دقت واقعی است؛ ولی محققین در مورد آزمایشهای اخیر مطمئن هستند.
محققین دانشگاههای MIT و بوستون همچنین دریافتند که میتوانند با تمرکز بر سیگنالهای خطای قویتری که مغز در زمان مواجهه با «خطاهای ثانویه» تولید میکند، عملکرد آفلاین سیستم را بهبود بخشند. این خطاهای ثانویه زمانی ایجاد میشوند که سیستم سیگنالهای مغزی انسان را به درستی دستهبندی نکرده باشد، بدین صورت که یا ربات انتخاب درستی انجام داده باشد و سیستم آن را به اشتباه سیگنال خطا تشخیص داده باشد و یا ربات اشتباه انتخاب کرده باشد و سیستم نتوانسته باشد سیگنال اولیهی خطا را تشخیص دهد.
با وارد کردن سیگنالهای خطا از خطاهای ثانویه، محققین توانستند عملکرد کلی سیستم را تا حدود ۲۰ درصد افزایش دهند. سیستم هنوز نمیتواند در آموزش دادن باکستر، سیگنالهای خطای ناشی از خطاهای ثانویه را پردازش کند؛ ولی زمانی که این قابلیت در آن ایجاد شود، محققین انتظار دارند بتوانند دقت کلی سیستم را تا ۹۰ درصد افزایش دهند.
محققین همچنین دریافتند افرادی که تاکنون کلاههای الکتروانسفالوگرافی را امتحان نکرده بودند نیز میتوانند به راحتی ربات باکستر را آموزش دهند. این نشانهی خوبی است که در آینده ممکن است بتوان به کلاههای الکتروانسفالوگرافی برای آموزش اتومبیلهای رباتیک، رباتهای انساننما و دیگر سیستمهای رباتیک مشابه اتکا کرد. جزئیات این مطالعه در مقالهای که اخیراً در کنفرانس رباتیک و اتوماسیون IEEE در سنگاپور پذیرفته شده، ذکر گردیده است.
آزمایشهای اینچنینی ممکن است باعث نشود بهزودی انسانها بتوانند از آن در جهت بهبود عملکرد رباتهای خانگی یا راننده استفاده کنند؛ ولی میتوانند به روشهای کاربردی واقعیتر برای آموزش رباتها، افزایش دقت سیستم و تکنولوژی کلاههای الکتروانسفالوگرافی و همچنین کاربر پسند شدن این کلاهها در خارج آزمایشگاه کمک کنند. محققین برنامهریزی کردهاند که در تحقیق بعدی از سیستم خطا برای آموزش باکستر در جهت انخاب گزینهی صحیح از بین چند گزینه استفاده کنند.
نوشته: جما تارلاک
ترجمه: امید محمدی - مجله علمی ایلیاد